单元描述
局部坐标系下的梁单元每个节点具有 6 个自由度,
上图所示的空间梁单元节点位移列向量 qe 和节点力列向量 Pe 分别为:
q(12×1)e=[u1ν1w1θx1θy1θz1u2ν2w2θx2θy2θz2]T
P(12×1)e=[Pu1Pv1Pw1Mx1My1Mz1Pu2Pv2Pw2Mx2My2Mz2]T
相应的刚度方程为:
K(12×12)e⋅q(12×1)e=P(12×1)e
单元刚度矩阵计算
与空间的 Euler-Bernoulli 梁单元刚度矩阵叠加类似,空间 Timoshenko 梁单元刚度矩阵为一个 12×12 的矩阵,看似很麻烦,实则可以根据刚度矩阵叠加原则,一点一点叠加上去!
轴向刚度:轴向位移,对应于节点位移 (u1,u2),直接应用杆单元的刚度矩阵:
Ke=lEA[1−1−11]
扭转刚度:扭转角,对应于节点位移 (θx1,θx2)
Ke=lGJ[1−1−11]
其中,J 为横截面的扭转惯性矩,G 为剪切模量。
纯弯刚度:对应于节点位移 (θy1,θz1,θy2,θz2)
对于 (θy1,θy2):
Ke=lEIy[1−1−11]
对于 (θz1,θz2):
Ke=lEIz[1−1−11]
剪切刚度:对应于节点位移 (v1,w1,θy1,θz1,v2,w2,θy2,θz2)
对于 (v1,θy1,v2,θy2)
Ke=fpyα4klGA42l−42l2ll2−2ll2−4−2l4−2l2ll2−2ll2
其中,
fpyα=1/(1+ξ∗SCF12Iyl2A)
对于 (w1,θz1,w2,θz2)
Ke=fpzα4klGA42l−42l2ll2−2ll2−4−2l4−2l2ll2−2ll2
其中,
fpzα=1/(1+ξ∗SCF12Izl2A)
剪切刚度矩阵修正
对于上面公式中出现的 fpα ,是 Abaqus 内部对于剪切刚度矩阵的修正方式,为了对标Abaqus,可以仿照Abaqus对剪切部分的刚度矩阵进行修正,相关理论可点击查看:Abaqus 官方文档
具体啥意思呢?我来自己总结下,不一定对,仅供参考哈!
Kα3=fpαKα3
其中,Kα3 表示修正后的剪切刚度矩阵,Kα3 表示未被修正的剪切刚度矩阵,fpα 表示的是一个无量纲因子,预防梁的剪切刚度过大。
fpα=1/(1+ξ∗SCF12Iααl2A)
其中,A 表示截面面积,对于一阶单元 ξ 为 1.0,对于二阶单元 ξ 为 10−4,SCF默认值为0.25,Iαα 为截面惯性矩,l 为梁长。
最终叠加后的单元刚度矩阵为:
Ke=lEA00000−lEA000000klGA0002kGA0−klGA0002kGA00klGA0−2kGA000−klGA0−2kGA0000lGJ00000−lGJ0000−2kGA04kGAl+lEIy0002kGA04kGAl−lEIy002kGA0004kGAl+lEIz0−2kGA0004kGAl−lEIz−lEA00000lEA000000−klGA000−2kGA0klGA000−2kGA00−klGA02kGA000klGA0−2kGA0000−lGJ00000lGJ0000−2kGA04kGAl−lEIy000−2kGA04kGAl+lEIy002kGA0004kGAl−lEIz0−2kGA0004kGAl+lEIz
数值案例
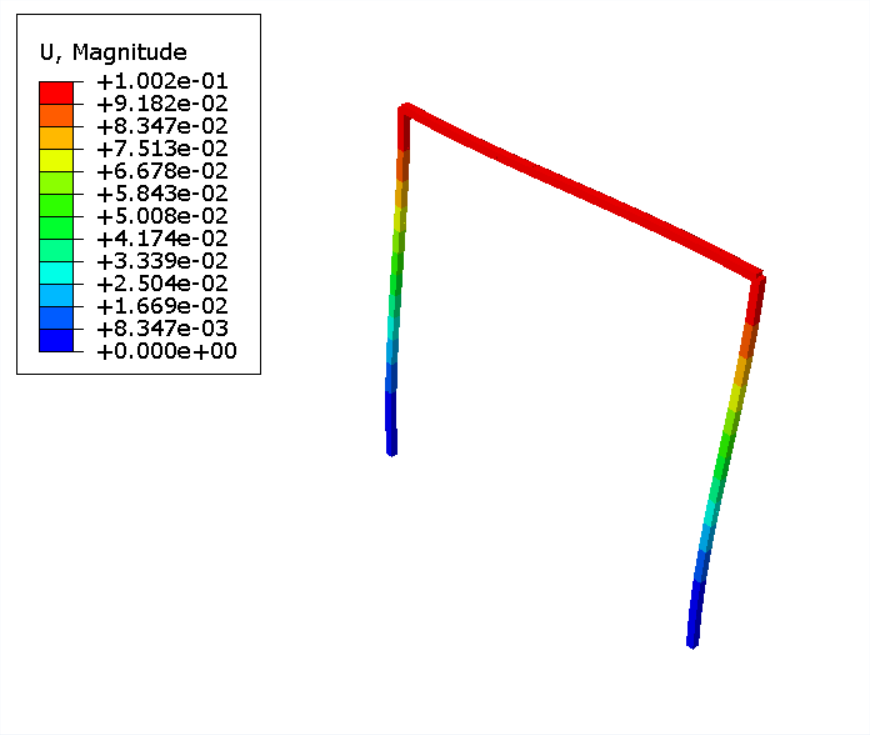
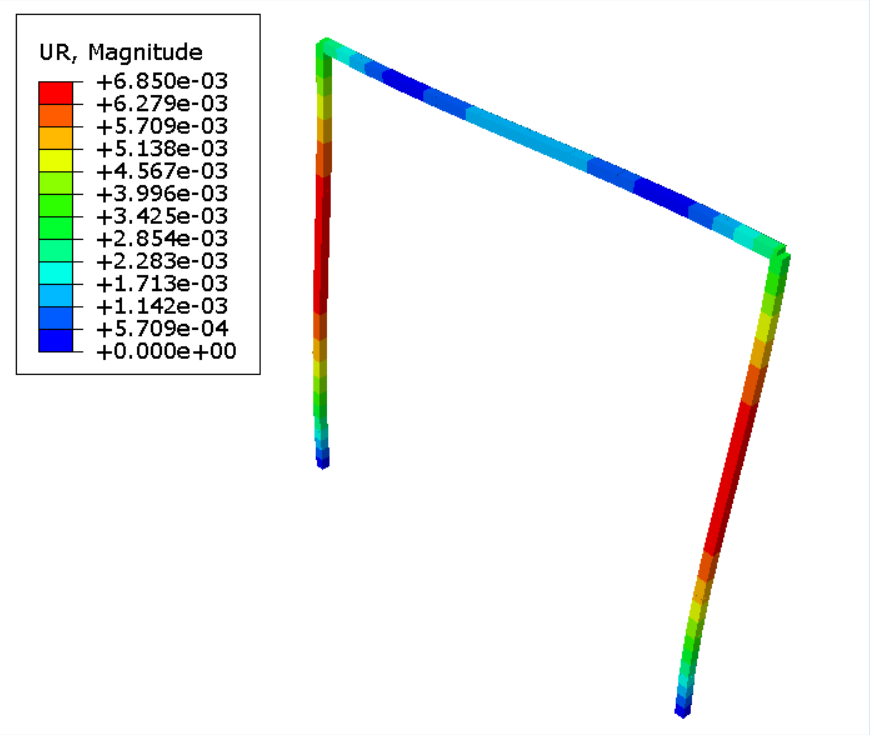
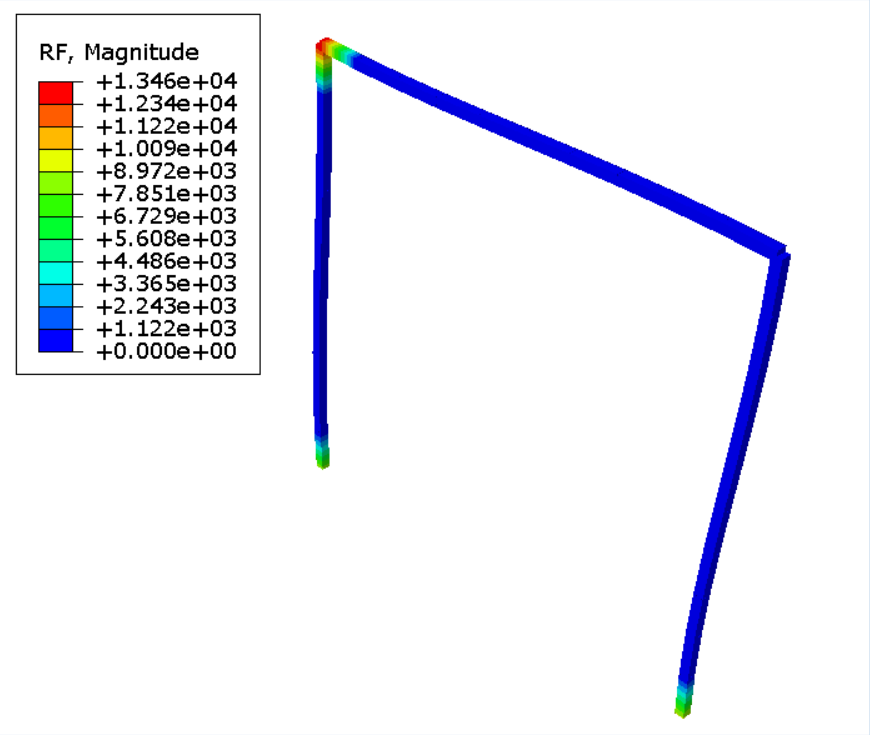
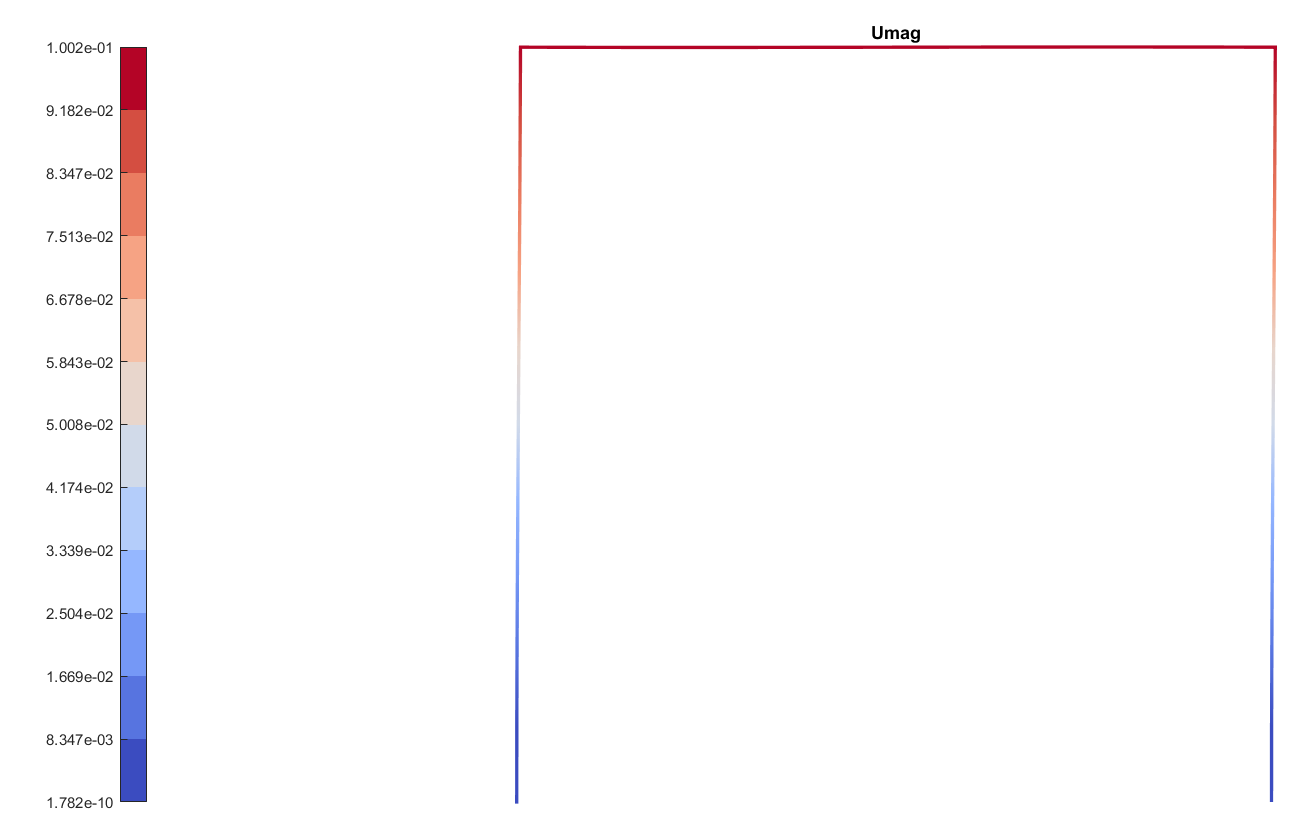
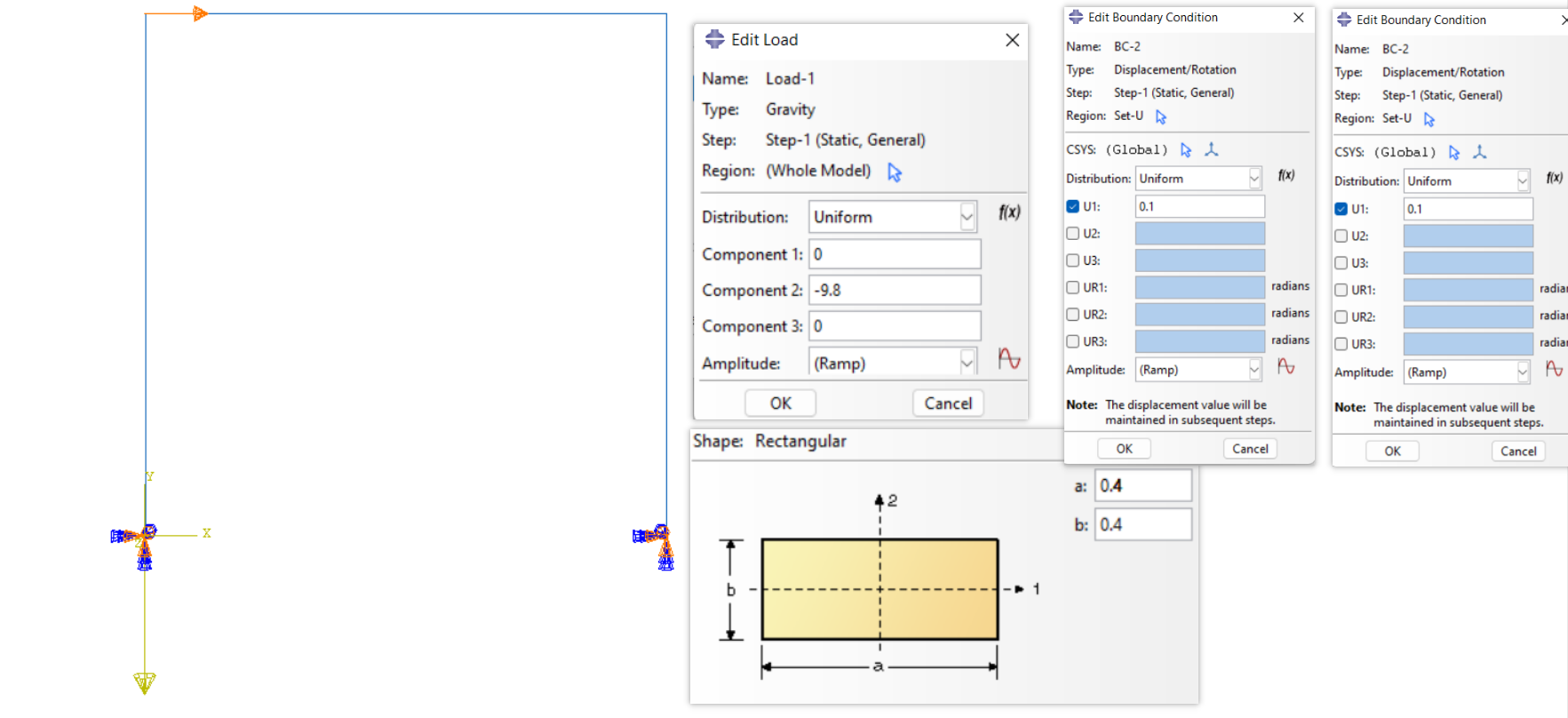
本次的案例将采用 Abaqus 对于 Timoshenko 梁剪切修正的方式进行数值编程,将单元刚度矩阵与 Abaqus 导出的单元刚度矩阵(以 1 号单元刚度矩阵为例)进行对标,位移场结果进行对标。几何模型及边界条件信息如下:
位移场对比
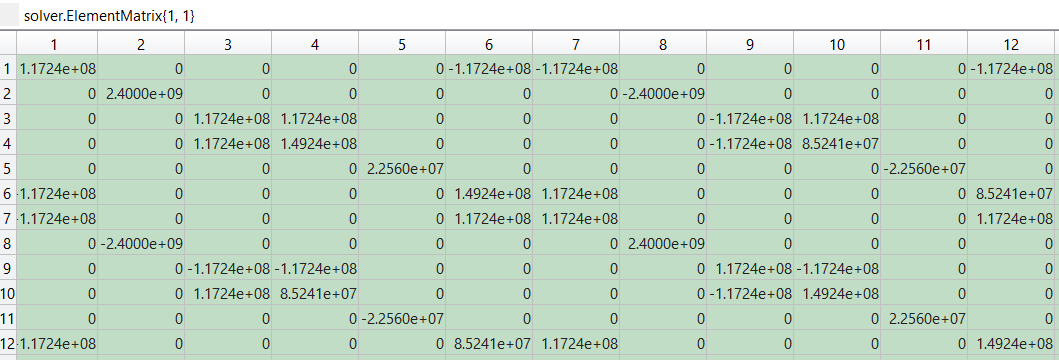
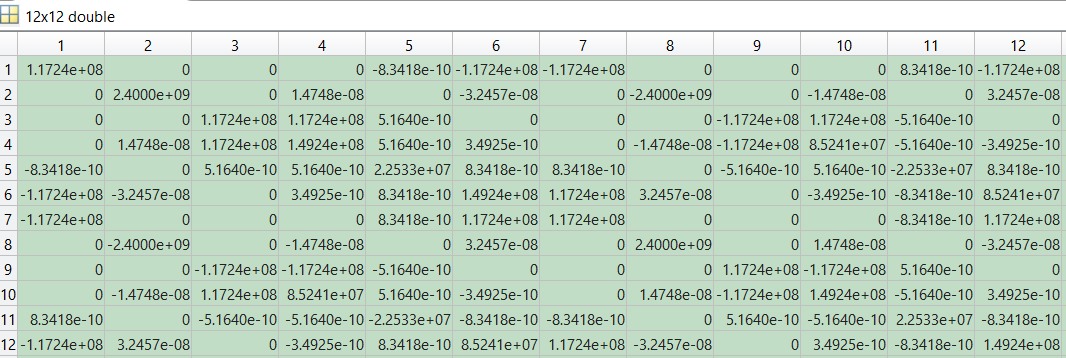
单元刚度矩阵对比
 |  |
|---|
| MFEA 单元刚度矩阵 | Abaqus 单元刚度矩阵 |
由以上对比结果可知,本次编制的三维 Timoshenko 梁单元刚度矩阵与 Abaqus 完全一致。